From Coursera, Introduction to Self-Driving Cars by University of Toronto
https://www.coursera.org/specializations/self-driving-cars?action=enroll
Self-Driving Hardware and Software Architectures
Sensors and Computing Hardware
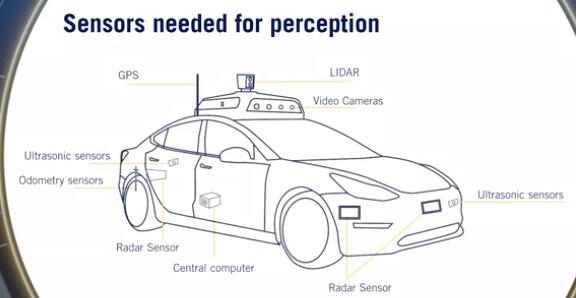
Sensors types and characteristics
- Sensor Categorization:
- exteroceptive: extero=surroundings
- proprioceptive: proprio=internal
- Camera:
- Sensors for perception: Essential for correctly perceiving
- Comparison metrics:
- Resolution
- Field of view
- Dynamic range: difference between the darkest and the lightest tones in an image
- other properties: focal length, depth of field and frame rate
- Trade-off between resolution and FOV
- stereo camera:
- The combination of two cameras with overlapping fields of view and aligned image planes
- allow depth estimation from synchronized image pairs
- Pixel values from image can be matched to the other image producing a disparity map of the scene. This disparity can then be used to estimate depth at each pixel.
- Lidar:
- involves shooting light beams into the environment and measuring the reflected return.
- include a spinning element with multiple stacked light sources
- output detailed 3D scene geometry from LIDAR point cloud
- not effected by the environments lighting. So do not face the same challenges as cameras when operating in poor or variable lighting conditions
- Comparison metrics:
- Number of beams: 8, 16, 32, and 64
- Points per second: The faster the point collection, the more detailed the 3D point cloud can be.
- Rotation rate: The higher this rate, the faster the 3D point clouds are updated.
- Field of view
- Upcoming: Solid state LIDAR
- without a rotational component of the typical LIDARs
- to become extremely low-cost and reliable.
- RADAR
- radio detection and ranging
- robust object detection and relative speed estimation
- particularly useful in adverse weather as they are mostly unaffected by precipitation.
- Comparison metrics:
- range
- field of view
- position and speed accuracy
- Configurations:
- WFOV (Wide FOV), short range
- NFOV (Narrow FOV), long range
- Ultrasonic
- for sound navigation and ranging
- Short-range all-weather distance measurement
- Ideal for low-cost parking solutions
- Unaffected by lighting, precipitation
- Comparison metrics:
- Range
- FOV
- Cost
- GNSS/IMU:
- Global Navigation Satellite Systems (e.g. GPS or Galileo) and Inertial measurement units
- Direct measure of ego vehicle states
- position, velocity(GNSS): varying accuracies:RTK,PPP,DGPS
- angular rotation rate(IMU)
- acceleration(IMU)
- heading (IMU, GPS)
- Wheel odometry sensors
- Tracks wheel velocities and orientation
- Uses these to calculate overall speed and orientation of car
- speed accuracy
- position drift
Self-driving computing hardware
- Need a”self-driving brain”: main decision makingunit of the car
- Image processing, Object detection, Mapping
- GPUs - Graphic Processing Unit
- FPGAs - Field Programmable Gate Array
- ASICs - Application Specific Integrated Chip
- Synchronization hardware
- To synchronize different modules and provide a common clock
- GPS relies on extremely accurate timing to function, and as such can act as an appropriate reference clock when available.
- sensor measurements must be timestamped with consistent times for sensor fusion to function correctly.
- Sensor placement:
Hardware Configuration Design
Sensor coverage requirements for different scenarios
- Assumptions:
- Aggressive deceleration: $5 m/s^2$
- Comfortable deceleration: $2 m/s^2$
- This is the norm,unless otherwise stated
- Stopping distance: $d=\frac {v^2}{2a}$
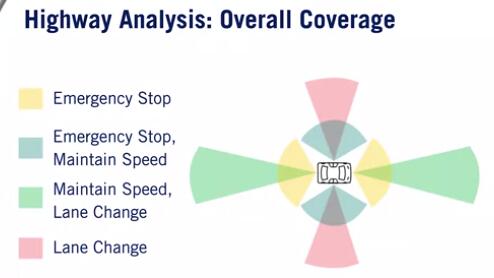
Highway driving
- Broadly,3 kinds of maneuvers: Emergency Stop, Maintain Speed, Lane change
- Emergency Stop:
- Longitudinal Coverage: Assume we are speeding at 120kmph
- Stopping distance could be ~110 metres; aggressive deceleration
- Lateral coverage: At least adjacent lanes, since we may change lanes to avoid a hard stop.
- Maintain Speed
- Relative speeds are typically less than 30 kmph.
- Longitudinal coverage: At least~100 metres in front.
- Both vehicles are moving, so don’t need to look as far as emergency-stop case.
- Lateral Coverage: Usually current lane Adjacent lanes would be preferred for merging vehicle detection.
- Lane Change
- summary:
Urban driving
- Broadly,6 kinds of maneuvers:
- Emergency Stop, Maintain Speed, Lane Change
- Overtaking, Turning,crossing at intersections, Passing roundabouts
- Overtaking:
- Longitudinal coverage: if overtaking a parked or moving vehicle, need to detect oncoming traffic beyond point of return to own lane.
- Lateral coverage: always need to observe adjacent lanes. Need to observe additional lanes if other vehicles can move into adjacent lanes.
- Intersections:
- Observe beyond intersection for approaching vehicles, pedestrian crossings, clear exit lanes.
- Requires near omni-directional sensing for arbitrary intersection angles.
- Roundabouts:
- Lateral coverage: Vehicles are slower than usual, limited range requirement.
- Longitudinal coverage: Due to the shape of theroundabout, need a wider field of view.
- Summary:

Overall coverage,blind spots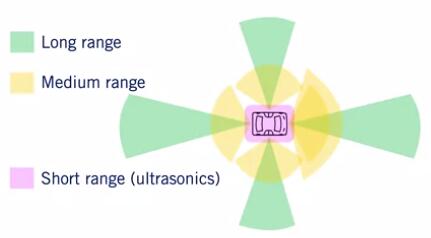
Software Architecture
the basic architecture of a typical self-driving software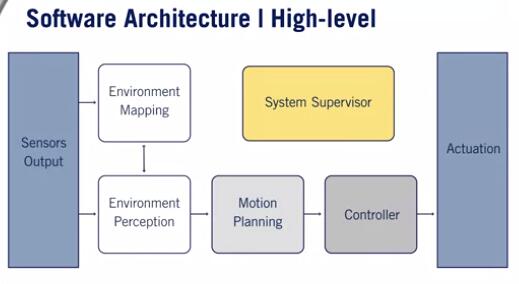
Identify the standard software decomposition
- Environment Perception
- Localization: GPS/IMU/Wheel Odometry
- Dynamic object detection -> Dynamic object tracking -> Object Motion Prediction: LIDAR, cameras, Radar
- Static object detection: HD road Map
- Environment Mapping
- Occupancy Grid Map: Object tracks, LIDAR
- Localization Map
- Detailed Road Map
- Motion Planning
- Mission Planner
- Behavior planner
- Local planner
- Controller
- Velocity controller: throttle percentage, brake percentage
- Steering controller: steering angle
- System Supervisor
- Hardware supervisor: sensor outputs
- Software supervisor: Environment perception, environment mapping, motion planning, controller
Environment Representation
Localization point cloud or feature map
- localization of vehicle in the environment.
- Collects continuous sets in LIDAR
- The difference between LIDAR maps is used to calculate the movement of the autonomous vehicle
Occupancy grid map
- collision avoidance with static objects.
- Discretized fine grain grid map
- Can be 2Dor 3D
- Occupancy by a static object
- Trees and buildings
- Curbs and other non drivable surfaces
- Dynamic objects are removed
Detailed road map
- path planning
- traffic regulation, lane boundaries
- 3 Methods of creation:
- Fully Online
- Fully Offline
- Created Offline and Updated Online

